Images as Functions#
在计算机视觉中,我们把图像定义为一个从R2映射到RM的函数f,其中f(x,y)给出了位置(x,y)处的像素值(范围[0,255])。对于灰度图像,M=1,而对于彩色图像,M=3(分别对应RGB三个通道,此时(x,y)处的像素值是一个三维向量)
对于连续函数,我们可以定义它的梯度∇f(x,y)=(∂x∂f,∂y∂f),它表示函数在位置(x,y)处的变化率。但是由于图像是离散的,我们需要使用有限差分来替代梯度:
∂x∂f∣x=x0≈2f(x0+1,y0)−f(x0−1,y0)
图像的梯度指向了图像中灰度变化最快的方向

Filters#
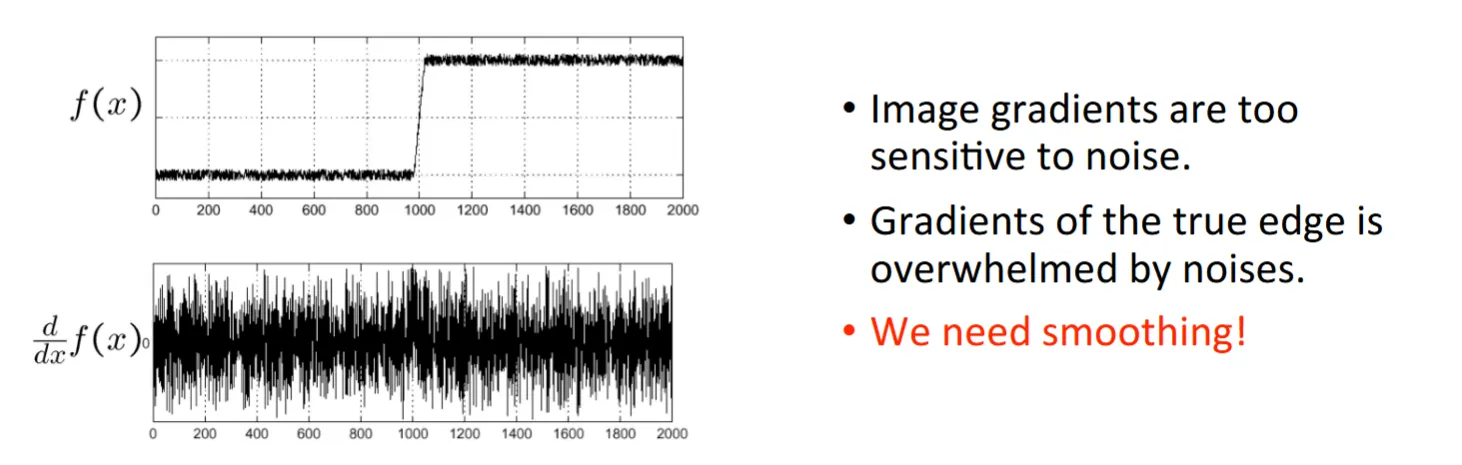
现实中的图像往往包含噪声,这些噪声可能会干扰我们后续的处理,因此需要进行平滑化处理
Filter(滤波)是一种常用的图像处理技术,它可以用于提取图像中有用的信息(比如边缘,拐角),也可以用于修改或增强图像的质量(超分,去噪)
一种滤波的方式是使用卷积运算,下面我们看一个一维滤波的例子
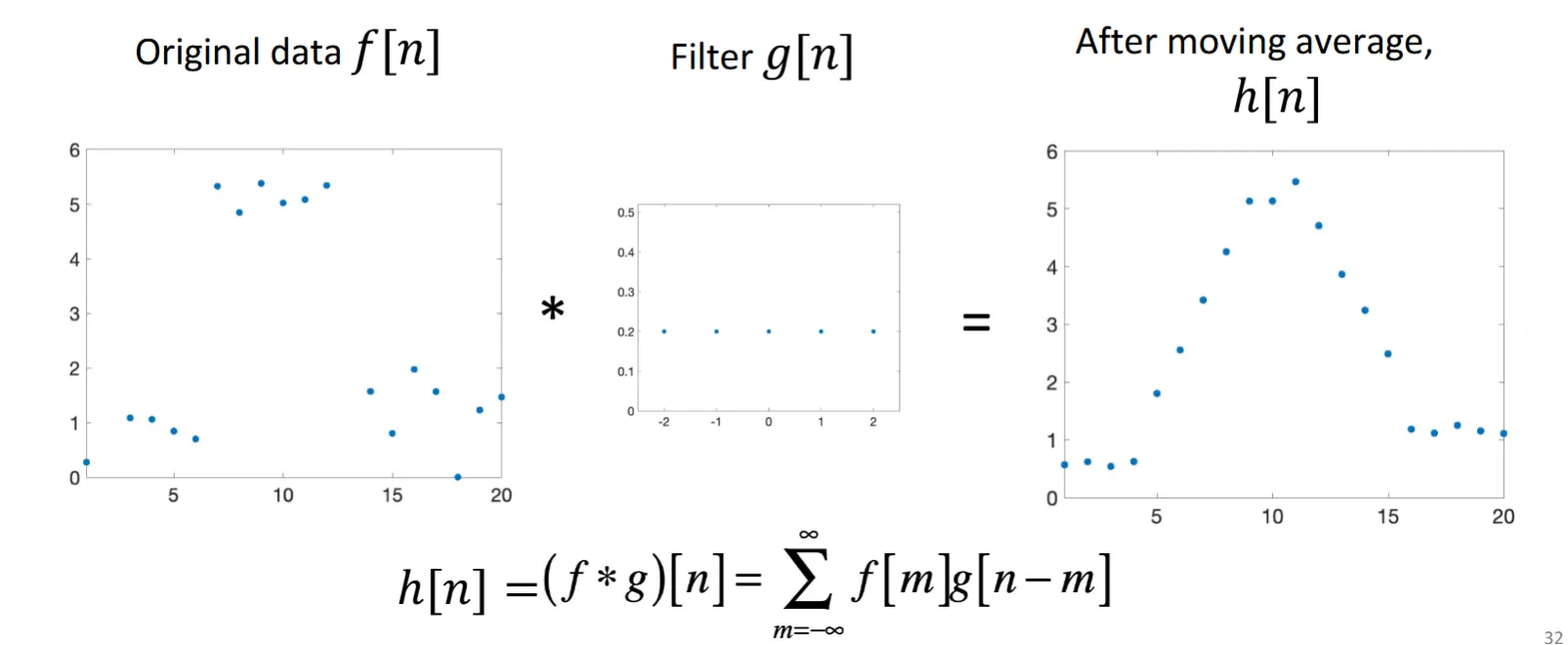
这个例子里面,把每个点的值替换成了它自己和它左右各两个点的平均值,这样就达到了平滑化的效果
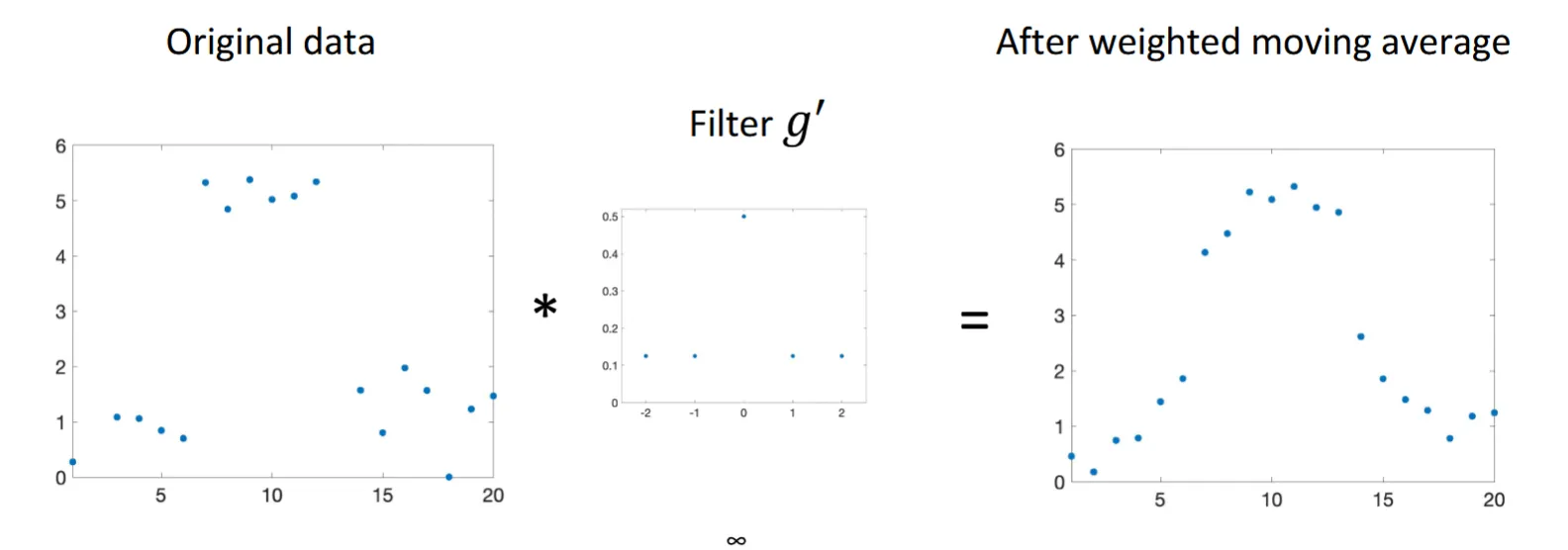
经过上面的处理后,每个部分的噪声都减小了,但是每个部分之间的变化也被模糊了。我们可以更改一下滤波器的权重,使得中心点的权重更大,这样就可以在平滑化的同时保留更多的细节
注意到我们上面做的两种滤波都是对原来的值进行线性组合的,这样的滤波器被称为线性滤波器(linear filter),满足L(a⋅f+b⋅g)=a⋅L(f)+b⋅L(g),因此可以用卷积来实现
2D Filters#
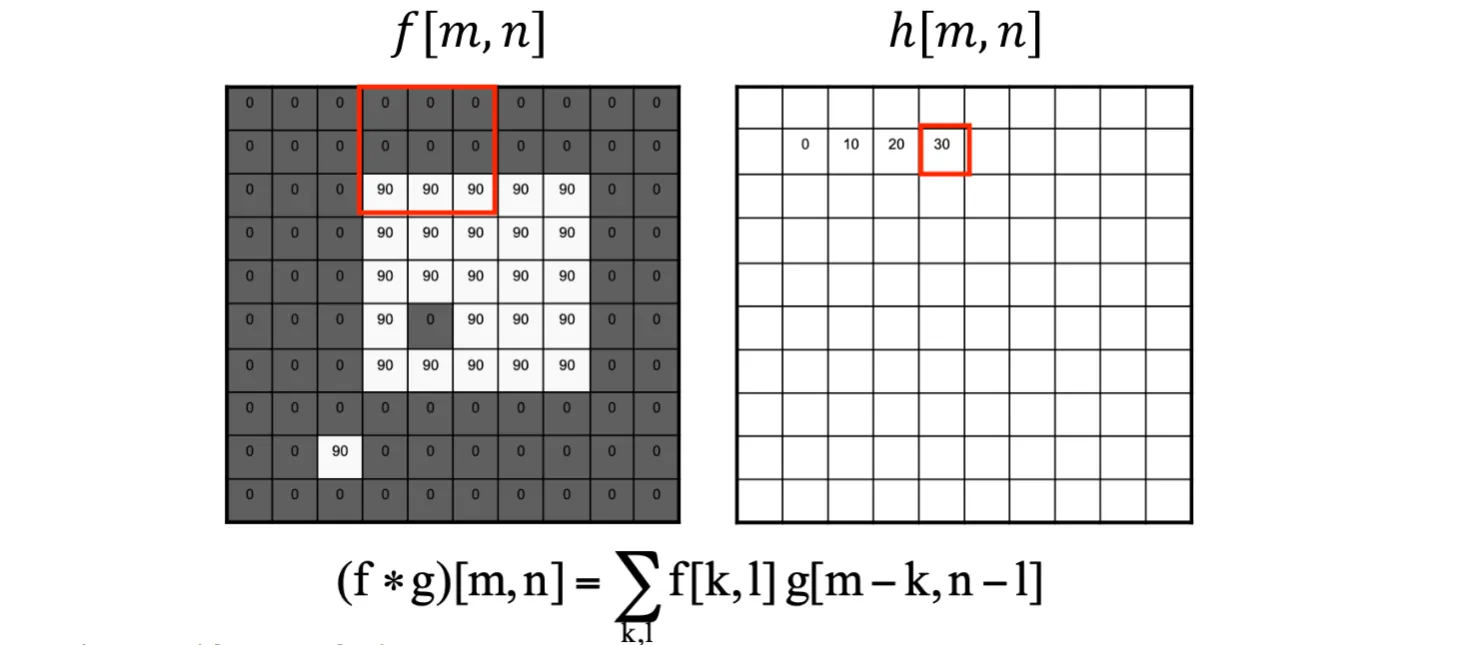
与一维的滤波器类似,我们只是把卷积核换成了一个二维的矩阵,这样就可以在图像上进行卷积操作了。
对于之前的平均滤波器,我们可以把它表示成一个3×3的卷积核:
91111111111
用这个卷积核对图像进行卷积操作,每次计算3x3的区域内的像素值的平均值,来替换中心点的像素值
除了上面提到的线性滤波器之外,还有一些非线性的滤波器,比如:
h[m,n]={1,f[m,n]>τ0,otherwise
可以将像素值大于τ的部分设置为1,其他部分置为0,这样就实现了二值化的效果
Edge Detection#
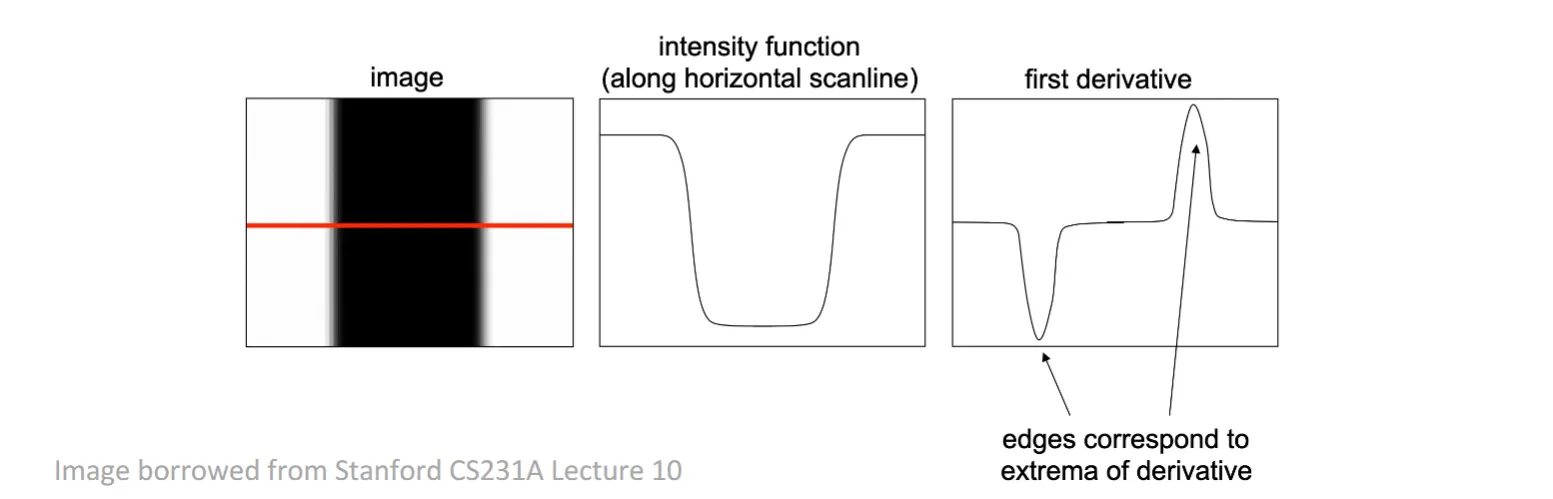
从物理意义上讲,边缘通常对应着物体边界、表面朝向的突变、阴影或者是光照强度的变化。为了能够更好检测到边缘,我们需要给边缘一个数学上的定义:
在图像中,沿图像一个方向的像素值有显著变化(或具有高对比度),而沿其正交方向的像素值几乎没有变化(或低对比度)的区域
根据这个定义,我们注意到边界的梯度值往往比较大,因此我们可以通过计算图像的梯度来检测边界
但是问题又来了,由于噪声的存在,图像的梯度值在噪点处也可能比较大,这样就会导致错误。这里就需要先进行平滑化处理
之前我们已经提到过一些滤波器,而最常用的平滑滤波器是高斯滤波器,这里我们先考虑一维的
g(x)=2πσ1e−2σ2x2
高斯滤波器的形状是一个钟形曲线,可以看到这个曲线主要位于0附近,因此是低通滤波器,可以用于做平滑处理。σ控制了滤波器的宽度,σ越大,滤波器越宽,平滑效果越强,但也会导致边缘模糊和定位精度下降
NMS#
有了经过平滑化和求导之后的图像,我们可以通过一些方法,比如筛选出一些梯度大于某个threshold的点,来检测边缘。但这些边缘可能比较宽(梯度方向上有多个点)。为了得到精细的边缘,保留局部最大值,我们可以使用非极大值抑制(Non-Maximal Suppression,NMS)来进一步细化边缘
具体的实现步骤:
- 对于每个边缘像素点,计算它的梯度方向
- 沿着梯度方向延申出两条线段(长度一般取1),分别指向正负两个方向,得到r,p两个点
- 通过双线性插值计算出r,p两个点的梯度值
- 如果当前点的梯度值大于r,p两个点的梯度值,则保留当前点,否则抑制掉
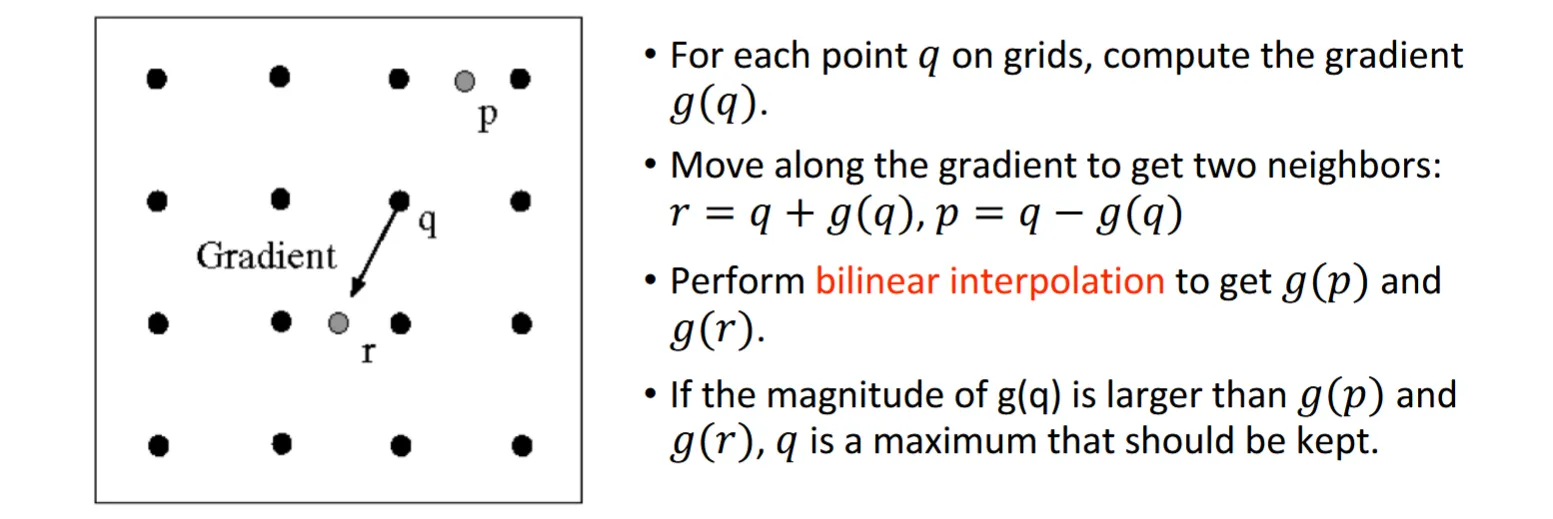
注意这里面r,p两个点实际上可能不存在于图像的像素位置上,因此需要通过双线性插值来计算出它们的梯度值
此外我们还可以简化一下NMS的计算过程,直接把梯度方向分类为4个主要方向(0°,45°,90°,135°,比如用是否大于22.5°来划分0°和45°),只需要对比八个相邻点中的两个点即可,不需要双线性插值
Hysteresis Thresholding#
经过NMS后,我们得到了一个比较细的边缘图,但是这些边缘之间可能存在一些断点(由于噪声或者是边缘本身的特性),我们可以通过双阈值连接(Hysteresis Thresholding)来把这些边缘连接起来。
Hysteresis Thresholding设置了两个阈值:maxVal和minVal(都是超参数)。对于边缘图中的每个像素点,如果它的梯度值大于maxVal,记为强边缘;如果它的梯度值小于minVal,则抑制掉该点;如果它的梯度值介于minVal和maxVal之间,记为弱边缘
对于强边缘,分别检查沿着边缘方向(垂直于梯度方向)的两个相邻像素点。如果是弱边缘,且梯度和中间点在同一个方向上(这里的要求可以比较宽,只需要方向在同一个范围内就行),且符合NMS要求,则该点成为一个强边缘
反复做直到没有强边缘再出现为止。
Canny Edge Detector#
Canny Edge Detector是一个经典的边缘检测算法,包含了上面提到的所有步骤:
- 使用高斯滤波器对图像进行平滑化处理,减少噪声的影响
- 计算图像的梯度,得到边缘的强度和方向
- 使用非极大值抑制(NMS)来细化边缘,保留局部最大值
- 使用双阈值连接(Hysteresis Thresholding)来连接边缘
Aside#
Convolution vs Correlationn#
数学上来说,卷积的定义是(f∗g)(n)=∫m=−∞+∞f(m)g(n−m)dm
而相关的定义是(f⋆g)(n)=∫m=−∞+∞f(m)g(n+m)dm
两者在1D上的区别在于卷积中的g函数被翻转了(n−m),我们上面提到的卷积操作其实严格数学上来说是相关操作
Convolution 实现#
不使用for loop,而是使用矩阵乘法来实现卷积操作。
- 把卷积核展开成一个行向量k,长度为K2(假设卷积核是K×K的)
- im2col:把输入图像的每个K×K的区域展开成一个列向量,得到一个矩阵Img,大小为K2×N,N=Hout×Wout
- k与Img进行矩阵乘法,得到一个行向量,长度为N,再把它reshape成Hout×Wout的输出图像